CODESYS hilft Dir bei der Konfiguration Deines RevPi DIO/DI/DO.
- Doppelklicke in CODESYS im Gerätebaum auf das RevPi DIO/DI/DO.
- Klicke auf die erste Registerkarte Module Parameters.
- Stelle in der Spalte Value die gewünschten Werte ein.
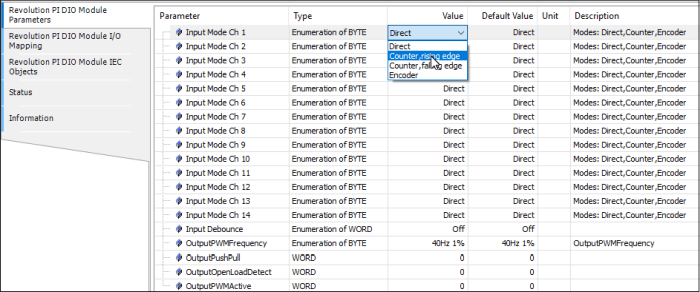
Konfigurationswerte des RevPi DIO
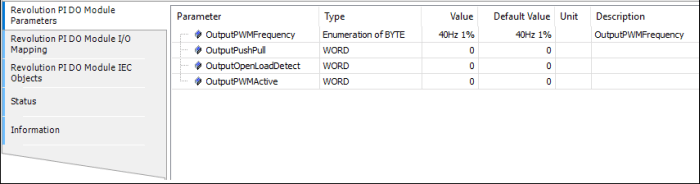
Konfigurationswerte des RevPi DO
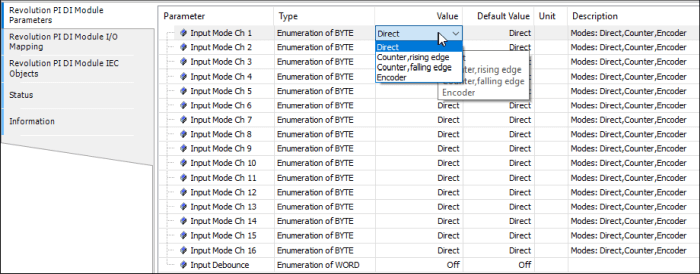
Konfigurationswerte des RevPi DI
Beschreibung der konfigurierbaren Werte von RevPi DIO/DI/DO
Im Folgenden findest Du eine detaillierte Beschreibung der Bereiche Eingänge, Ausgänge, Speicher, Zähler, Encoder und PWM.
Input
Im Bereich Input kannst Du alle Parameter einstellen, die Dein RevPi Modul empfängt, z. B. die Werte eines Temperatursensors.
|
Name |
Datentyp |
Anzahl |
Offset |
RevPi DIO |
RevPi DI |
RevPi DO |
Beschreibung |
|
Input |
WORD |
1 |
0 |
X |
X |
|
Aktuelle Werte an den Eingängen. Die Bits 0 – 15 (DI) bzw. 0-13 (DIO) zeigen die aktuellen Werte der Eingänge 1 – 16 (DI) bzw. 1-14 (DIO) an. |
|
Output Status |
WORD |
1 |
2 |
X |
|
X |
Bitcodierter Status der Ausgänge. Die Bits 0 – 15 (DO) bzw. 0-13 (DIO) zeigen den aktuellen Fehlerzustand der Ausgänge 1 – 16 (DO) bzw. 1-14 (DIO) an. 1: Fehler am Ausgang (Abschaltung wegen Übertemperatur, Überlast..). 0: kein Fehler |
|
Status |
WORD |
1 |
4 |
X |
X |
X |
Modulstatus Hinweis: Die Werte von Bit 0-7 gelten für RevPi DIO und DI. Für RevPi DO sind die Bits nicht belegt, da dieses Modul keinen Eingangsbaustein hat. Bit 0: Keine Kommunikation zum Eingangsbaustein. Bit 1: UV1* auf Eingang 1 – 8 Bit 2: UV2* auf Eingang 1 – 8 Bit 3: Übertemperatur** für Eingang 1 – 8 Bit 4: UV1* auf Eingang 9 – 16 Bit 5: UV2* auf Eingang 9 – 16 Bit 6: Übertemperatur** für Eingang 9 – 16 Bit 7: Fehlermeldung des Eingangsbausteins Hinweis: Die Werte von Bit 8-16 gelten für RevPi DIO und DO. Für RevPi DI sind die Bits nicht belegt, da das Modul keinen Ausgangsbaustein hat. Bit 8: Keine Kommunikation zum Ausgangsbaustein. Bit 9: Der Ausgangsbaustein meldet einen CRC-Fehler. Bit 10: Fehlermeldung des Ausgangsbausteins. Bit 11 – 15: undefiniert |
|
Counter |
DINT |
16 |
6 |
X |
X |
|
Aktuelle Werte der Counter- bzw. Encoderfunktion. |
UV1: Die Versorgungsspannung für die Eingangsbausteine ist unter 7 Volt gesunken. Der Alarm wird aufgehoben, wenn der Wert wieder über 9 Volt steigt.
UV2: Die Versorgungsspannung für die Eingangsbausteine ist unter 14 Volt gesunken. Der Alarm wird aufgehoben, wenn der Wert wieder über 16,5 Volt steigt.
Die Kanäle 1-8 und 9-16 haben getrennte Bits für UV1 und UV 2, weil dafür zwei individuelle Bausteine im Modul sind, die dieses Signal erzeugen. Die Spannung liegt jedoch immer an beiden Bausteinen identisch an. Deshalb setzen beide Bausteine ihr Fehlerbit bei UV1 oder UV2.
**Die Eingangsbausteine melden einen Übertemperatur-Alarm, wenn 135 °C überschritten werden.
Output
Im Bereich Output kannst Du Einstellungen für alle Prozesswerte vornehmen, die Dein RevPi Modul sendet.
|
Name |
Datentyp |
Anzahl |
Offset |
RevPi DIO |
RevPi DI |
RevPi DO |
Beschreibung |
|
Output |
WORD |
1 |
70 |
X |
|
X |
Aktuelle Werte an den Ausgängen. Die Bits 0 – 15 (DO) bzw. 0-13 (DIO) zeigen die aktuellen Werte der Ausgänge 1 – 16 (DO) bzw. 1-14 (DIO) an. |
|
PWM |
USINT |
16 |
72 |
X |
|
X |
Aktuelle PWM-Werte in % für die Ausgänge 1 – 16 (DO) bzw. 1-14 (DIO). |
Memory
Im Bereich Memory kannst Du festlegen, wie die einzelnen Eingänge ausgewertet werden sollen und wie die Ausgänge eingestellt werden.
|
Name |
Datentyp |
Anzahl |
Offset |
RevPi DIO |
RevPi DI |
RevPi DO |
Beschreibung |
|
InputMode |
BYTE |
16 |
88 |
X |
X |
|
Auswahl des Modus für den jeweiligen Eingang. Direct: Es kann der aktuell anliegende Wert des Eingangs abgerufen werden. Counter, rising edge: Am Eingang werden die steigenden Flanken gezählt. Counter, falling edge: Am Eingang werden die fallenden Flanken gezählt. Encoder: Dieser Eingang wird für die Encoderfunktion verwendet. Hinweis: Für die Encoderfunktion werden immer zwei Eingänge benötigt (s. Abschnitt „Encoder“.) |
|
InputDebounce |
WORD |
1 |
104 |
x |
x |
|
Hier wird für alle Eingänge eine Zeit für den Entprellfilter angegeben. Diese Zeit gibt an, ab wann ein wechselnder Zustand am Eingang als stabil angesehen wird. Mögliche Werte sind Off, 25 µs, 750 µs und 3 ms. |
|
OutputPushPull |
WORD |
1 |
106 |
X |
|
X |
Hier wird für die Ausgänge festgelegt, ob sie im Pushpull- oder im Highsidemodus betrieben werden. |
|
OutputOpenLoadDetect |
WORD |
1 |
108 |
X |
|
X |
Hier wird für die Ausgänge festgelegt, ob eine open-load Erkennung aktiv ist. |
|
OutputPWMActive |
WORD |
1 |
110 |
X |
|
X |
Hier wird festgelegt, ob der Ausgang im PWM-Modus betrieben werden soll. |
|
OutputPWMFrequency |
BYTE |
1 |
112 |
X |
|
X |
Hier wird für alle Ausgänge, die im PWM-Modus betrieben werden sollen, festgelegt, mit welcher Frequenz das PWM-Signal erzeugt werden soll. Allgemein gilt: Je höher die Frequenz, desto höher ist die Schrittweite, in der das Taktverhältnis eingestellt werden kann. |
Counter
Du kannst für jeden der 14 Eingänge optional eine Zählerfunktion einschalten. Du kannst mit dieser Funktion z. B. zählen, wie oft ein Drehkreuz oder ein Taster betätigt wurde.
Ein Beispiel dafür findest Du auch in unseren Video-Tutorials.
Für jeden Zähler steht dann ein 32 Bit Wert im Prozessabbild.
Der aktuelle Zählerwert wird als signed 32-Bit-Wert zurückgegeben.
Encoder
Du kannst alle Eingänge als Encoder (Drehwertgeber) konfigurieren. In Kombination mit der PWM-Funktion ist das z. B. dann hilfreich, wenn Du Teile von Mengen steuern möchtest. Damit kannst Du etwa eine Wasserzufuhr regulieren oder Lichter dimmen.
Du kannst maximal fünf Encoder verwenden.
Pro Encoder benötigst Du jeweils zwei Eingänge. Dazu musst Du die Eingänge immer paarweise verwenden, z. B.:
Eingang 1 und 2,
Eingang 3 und 4
…
Eingang 13 und 14 (bzw. Eingang 15 und 16 bei RevPi DI)
Es ist wichtig, dass Du den ersten Encoder-Kanal immer an einem ungeraden Eingang anlegst. Wenn Du das nicht tust und z. B. Eingang 2 und 3 verwendest, wird Dein Encoder nicht erkannt.
Der aktuelle Encoderwert wird als signed 32-Bit-Wert für den ersten Kanal zurückgegeben.
PWM
Du kannst für jeden der 14 Ausgänge optional eine PWM-Funktion einschalten.
Die PWM-Funktion ist z. B. dann hilfreich, wenn Du Teile von Mengen steuern möchtest. Damit kannst Du etwa eine Wasserzufuhr regulieren oder Lichter dimmen.
Bei eingeschaltetem PWM wird statt einem Bit pro Kanal ein ganzer Bytewert von 0 bis 100 übertragen, der die Pulsweite am Ausgang in Prozent definiert. Per Konfiguration kann pro Modul eine der folgenden PWM-Frequenzen festgelegt werden:
|
PWM-Frequenz |
Auflösung der kleinsten Schrittweite in Prozent (Tastgrad) |
|
40 Hz |
1 % |
|
80 Hz |
2 % |
|
160 Hz |
4 % |
|
200 Hz |
5 % |
|
400 Hz |
10 % |
Der aktuelle Tastgrad in % wird über einen unsigned 8 bit Wert eingestellt.